Primates as Models for Computing and Communication
Primate species will provide new and important biological inspirations for the design and implementation of communications and networking protocols. As with more traditionally studied social and aggregating organisms such as insects, fish, and birds, simple rules underlie aggregation, communication, social interaction (e.g., dominance), predator avoidance, and aggregation. However, unlike insects, fish, and even birds, primates have a variety of individual capabilities that must be integrated with social and group life. These include much greater cognitive capabilities (which require a state-based game-theoretic approach, to be discussed later), individual recognition, and enhanced learning and communication capabilities. The ultimate challenge in translating what we learn from primates into communications and networking protocols is how primates integrate individual and group capabilities into robust and adaptable social and group behavior.
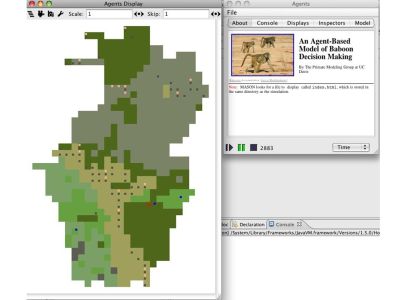
The goal of this project is to examine primate grouping strategies, territory exploration, conflict management, and communications as models for mobile and static sensor networks, using agent-based models. We have our initial version of PrimateWorld running, which is an agent-based modeling (ABM) environment developed in MASON (Luke, et. al., 2003). To model primates, we are developing a cognitive architecture that allows us to incorporate internal variables such as motivations, emotions, personality, and hormonal states. To do this, we are implementing a type of probabilistic classifier system. For example, high thirst increases the probability of moving towards a water source (see Figure 1). Thus, as motivations change over time, so do the frequencies of different types of behavior. We have also implemented modeling environments with landscapes, which are images that agents can interact with. Agents can interact, respond, or be constrained by properties of each pixel in the landscape. While landscapes taken from images are represented by discrete pixels, agents are continuous and move continuously in space. Thus, they can be scaled to actual size but interact with the properties of the pixel they are in.
These agent-based models are then applied to the distributed control of mobile and static sensor networks.
This project is a collaborative effort between Drs. Karen Bales and Jeffrey Schank of the Dept of Psychology of UC-Davis, and Drs. Yang Xiao, Fei Hu, Monica Anderson, and Xiaoyan Hong of the Dept. of Engineering, University of Alabama, Tuscaloosa.
Figure 1. Baboon natural habitat after (Bryson, Ando, and Lehmann 2007). We have implemented several variables such as hunger and thirst. In the image to the right, red dots are motivated by thirst and thus moving towards the water (blue squares).
This material is based upon work supported by the National Science Foundation under Grant No. 0829828.